訊鵬攜手西門子,共促PROFINET 2018技術(shù)開發(fā)研討會看板產(chǎn)品配套創(chuàng)新
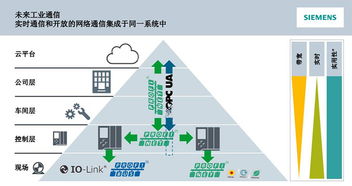
2018年,訊鵬科技與西門子強強聯(lián)合,為西門子PROFINET技術(shù)開發(fā)研討會提供了專業(yè)的看板類產(chǎn)品配套服務(wù)。PROFINET作為工業(yè)自動化領(lǐng)域的先進通信協(xié)議,其技術(shù)開發(fā)和應(yīng)用推廣對提升智能制造效率至關(guān)重要。訊鵬憑借其在工業(yè)顯示和看板系統(tǒng)方面的深厚技術(shù)積累,為研討會定制了高效、可靠的看板解決方案,包括實時數(shù)據(jù)展示屏、生產(chǎn)狀態(tài)監(jiān)控看板及交互式信息終端。這些產(chǎn)品不僅支持PROFINET協(xié)議的無縫集成,還通過直觀的可視化界面,幫助與會者深入理解技術(shù)細節(jié),促進開發(fā)經(jīng)驗的交流與共享。此次合作不僅強化了訊鵬在工業(yè)物聯(lián)網(wǎng)領(lǐng)域的品牌影響力,也助力西門子推動了PROFINET技術(shù)的普及與創(chuàng)新,為行業(yè)數(shù)字化轉(zhuǎn)型注入了新動力。
如若轉(zhuǎn)載,請注明出處:http://www.jx54.cn/product/19.html
更新時間:2026-06-19 15:17:37